

















 |
Intel Galileo Entwicklungsplatine |

 Produktdetails anzeigen
Produktdetails anzeigenWeitere Informationen über Intel Quark SoC X1000 Processors
Weitere Informationen über die Intel DK50 Series Gateway Lösung für das Internet der Dinge (IoT)
Intel Galileo vs. Raspberry Pi
Open-Source-Hardware
Galileo ist eine Mikrocontroller-Platine, die auf dem Intel® Quark SoC X1000 Anwendungsprozessor basiert, einem 32-Bit-System der Intel Pentium-Klasse auf einem Chip (Datenblatt). Sie ist die erste Platine, die auf der Intel Architektur basiert, die Hardware- und Software-kontaktkompatibel mit für den Uno R3 entwickelten Arduino-Schirmungen ist. Die digitalen Kontakte 0 bis 13 (und die angrenzenden AREF- und GND-Kontakte), die analogen Eingänge 0 bis 5, die Leistungs- sowie ICSP-Stiftleiste und die UART Port-Kontakte (0 und 1) befinden sich alle in denselben Positionen wie auf dem Arduino Uno R3. Dies ist auch als Arduino 1.0 Kontaktbelegung bekannt.
Galileo wurde entwickelt, um Schirmungen die entweder auf 3,3V oder 5V betrieben werden, zu unterstützen. Die Core-Anzugsspannung von Galileo beträgt 3,3V. Eine Steckbrücke auf der Platine ermöglichte jedoch eine Spannungsübersetzung von 5V auf die I/O-Kontakte. Dies unterstützt 5V Uno-Schirmungen und ist das voreingestellte Verhalten. Durch Schalten der Steckbrücken-Position kann die Spannungsübersetzung deaktiviert werden, um einen 3,3V Betrieb an den I/O-Kontakten zu bieten.
Natürlich ist die Galileo-Platine mit der Arduino Software-Entwicklungsumgebung (IDE) kompatibel, dies macht die Nutzung und die Einführung ausgesprochen einfach. Zusätzlich zur Kompatibilität mit der Arduino Hardware und Software verfügt die Galileo-Platine über verschiedenen Standard-I/O-PC-Ports und unterstützt, die ursprüngliche Nutzung und die Fähigkeiten über das Arduino Schirmungs-Ökosystem hinaus zu erweitern. Ein großer Mini-PCI Express-Steckplatz, 100Mb Ethernet-Port, Mikro-SD-Steckplatz, RS-232 serieller Port, USB Host Port, USB Client Port und 8MByte NOR Flash sind standardmäßig auf der Platine vorhanden.
|
|
Blockdiagramm |
Einzelheiten der durch die Intel-Architektur unterstützten FunktionenDer originale Intel-Prozessor und die ursprünglich zugehörigen I/O-Fähigkeiten des Clanton SoC schaffen ein voll funktionsfähiges Angebot sowohl für die Hersteller als auch für Studenten. Es ist auch sehr hilfreich für Entwickler, die nach einer einfachen und kostengünstigen Entwicklungsumgebung für die komplexeren Designs suchen, die auf dem Intel Atom-Prozessor und dem Intel Core Prozessor basieren.
|
||||||
StromversorgungGalileo wird von einem AC-zu-DC-Netzteil versorgt, indem ein 2,1mm Stecker (center-positiv) in den Stromanschluss der Platine angeschlossen wird. Die empfohlene Ausgangsleistung des Netzteils ist 5V bei bis zu 3Amp. |
Elektrische Zusammenfassung
|
KommunikationGalileo hat eine Reihe von Möglichkeiten, um mit einem Computer, einem anderen Arduino oder anderen Mikrocontrollern zu kommunizieren. Galileo bietet UART TTL (5V / 3,3V) serielle Kommunikation, der am digitalen Kontakt 0 (RX) und 1 (TX) zur Verfügung steht. Darüber hinaus bietet eine zweite UART RS-232-Unterstützung und wird über eine 3,5-mm-Buchse angeschlossen. Die USB-Geräteports ermöglichen serielle (CDC) Kommunikation über USB. Dies ermöglicht eine serielle Verbindung zum Serial Monitor oder anderen Anwendungen auf Ihrem Computer. Es ermöglicht auch, Galileo als USB-Maus oder als Tastatur eines angeschlossenen Computers zu verwenden. Weitere Informationen zu diesen Funktionen finden Sie auf den entsprechenden Seiten zu Maus- und Tastatur in der Dokumentation. Der USB-Host-Anschluss lässt Galileo als USB-Host der angeschlossenen Peripheriegeräte wie Mäuse, Tastaturen und Smartphones. fungieren. Weitere Informationen zu diesen Funktionen finden Sie auf den entsprechenden Seiten zum USB-Host in der Dokumentation. Galileo ist die erste Arduino-Platine mit Mini-PCI-Express (mPCIe). Über diesen Steckplatz können mPCIe-Module in voller Größe und halber Größe (mit Adapter) auf dem Board angeschlossen werden. Außerdem bietet er über den Steckplatz einen zusätzlichen USB-Host-Anschluss. Jedes Standard-mPCIe-Modul kann angeschlossen und für Anwendungen wie Wi-Fi, Bluetooth oder Mobilfunk-Konnektivität verwendet werden. Anfänglich bot der Galileo mPCie-Sllot Unterstützung für die WiFi-Bibliothek. Für weitere Einzelheiten lesen Sie bitte in der Intel Galileo Anleitung für die ersten Schritte nach. Es ist ein Ethernet-RJ45-Steckverbinder zur Verbindung von Galileo mit kabelgebundenen Netzwerken. Bei Anschluss an ein Netzwerk, müssen Sie eine IP-Adresse und MAC-Adresse angeben. Volle Unterstützung der On-Board-Ethernet-Schnittstelle ist vollständig gegeben. Die SPI-Schnittstellen wie bei bestehenden Arduino-Schirmungen ist nicht erforderlich. Der On-Board-microSD-Kartenleser wird durch die SD-Bibliothek angesteuert. Die Kommunikation zwischen Galileo und der SD-Karte wird durch einen integrierten SD-Controller hergestellt. Verwendung der SPI-Schnittstelle wie bei anderen Arduino-Platinen ist es nicht erforderlich. Die Arduino-Software enthält eine Drahtbibliothek für den einfacheren Einsatz des TWI2C Bus. Weitere Informationen finden Sie in der Dokumentation. Für die SPI-Kommunikation verwenden Sie die SPI-Bilbliothek. |
ProgrammierungGalileo kann über die Arduino-Software (Download) programmiert werden. Wenn Sie bereit sind, den Umriss auf die Platine zu laden, programmieren Sie den Galileo über den USB-Client-Port, indem Sie "Intel Galileo" als Ihre Platine in der Arduino IDE auswählen. Schließen Sie den als USB-Client bezeichneten Port von Galileo (der sich gleich beim Ethernet befindet) an Ihren Computer an. Für weitere Einzelheiten, lesen Sie bitte in der Referenz, den Tutoriums und der Intel Galileo Anleitung für die ersten Schritte nach. Anstatt ein Reset durch das physische Drücken der Reset-Taste erforderlich zu machen, ist Galileo so konzipiert, dass sie über die Software, die auf einem angeschlossenen Computer läuft, zurückgesetzt wird. Wenn die Platine hochfährt, sind zwei Szenarien denkbar:
Wenn ein Umriss ausgeführt wird, können Sie diesen aus dem IDE hochladen, ohne dabei die Reset-Taste der Platine zu drücken. Der Umriss wird angehalten; der IDE wartet auf den Status des Hochladens und beginnt dann erneut damit, den Umriss hochzuladen. Durch Drücken der Reset-Taste auf der Platine startet ein Umriss neu, wenn er aktuell ausgeführt wird, und setzt alle zugehörigen Abschirmungen zurück. |
Eigenschaften der als Ausgang konfigurierten KontakteKontakte, die als Ausgang mit pinMode() konfiguriert sind sollen sich in einem niederohmigen Zustand befinden. Ist ein Kontakt auf Galileo als Ausgang konfiguriert, wird die Funktionalität über einen I2C-basierenden Cypress I / O-Expander hergestellt (Datenblatt). Digital Kontakte 0 bis 13 und anloge Kontakte A0 bis A5 können auf Galileo als Ausgangskontakte konfiguriert werden. Sind die I/O-Expander-Kontakte als Ausgang konfiguriert, können sie bis zu 10mA (Milliampere) entwickeln (liefert positive Spannung) und verlieren (liefert negative Spannung) bis zu 25 mA Strom im Vergleich zu anderen Geräten/Stromkreisen. Der individuell erzeugte Strom pro Kontakt von 10 mA unterliegt einer Gesamtgrenze von 80 mA zwischen allen verbundenen Ausgangskontakte. Die pro Kontakt-Spannungssenkung unterliegt einem Gesamtgrenzwert von 200 mA. Die folgende Tabelle gibt eine Übersicht über die Gesamtausgabefähigkeiten der Kontakte.
|
Galileo Jumper KonfigurationAuf Galileo gibt es drei Jumper zur Variation der Konfiguration der Platine. IOREF Jumper lassen Galileo sowohl 3,3V als auch 5V Schirmungen unterstützen. Die externe Betriebsspannung wird über einen Jumper gesteuert. Wenn der Jumper an 5V angeschlossen ist, wird Galileo so konfiguriert, dass sie mit 5V-Schirmung kompatibel ist. IOREF ist auf 5V eingestellt. Wenn der Jumper an 3,3V angeschlossen ist, wird Galileo so konfiguriert, dass sie mit 3,3V-Schirmung kompatibel ist. IOREF ist auf 3,3V eingestellt. Der Eingangsbereich des Analog-Kontakte wird auch durch die IOREF Jumper gesteuert und darf die gewählte Betriebsspannung nicht übersteigen. Allerdings bleibt die Auflösung von AnalogRead() bei 5 V/1.024 Einheiten für die Standard-10-Bit-Auflösung oder 0,0049V (4.9mV) pro Einheit unabhängig von der IOREF Jumper-Einstellung. Warnung: Der IOREF Jumper sollte dazu verwendet werden, die Betriebsspannungen der Platine und der Schirmung anzupassen. Falsche Einstellung der Spannung könnte die Platine oder die Schirmung beschädigen. I2C Addresse Jumper: Um Konflikte zwischen der I2C Slave-Adresse des I/O-Expanders der Platine und EEPROM mit irgendeinem externen I2C Slave-Gerät zu vermeiden, können Jumper J2 dafür verwendet werden, die I2C-Adressen der On-Board-Geräte einzustellen. Wenn J2 mit Kontakt 1 (mit weißen Dreieck gekennzeichnet) verbunden ist, ist die 7-Bit I/O-Expander-Adresse 0100001 und die 7-Bit EEPROM-Adresse ist 1010001. Wird die Position des Jumpers geändert, ändert sich die I/O-Expander-Adresse zu 0100000 und die EEPROM-Adresse zu 1010000. VIN Jumper Auf Galileo, kann die VINKontakt zur Versorgung von angeschlossenen Schirmungen oder Komponenten mit 5V des geregelten Netzteils, das an die Stromversogrung angeschlossen ist, verwendet werden. Falls mehr als 5V über VIN für eine Schirmung nötig sind, sollte der VIN Jumper von Galileo entfernt werden und so die Verbindung zwischen der On-board-5V-Versorgung und der VIN-Verbindung auf der Platinen-Stiftleiste unterbrochen werden. Warnung: Werden der VIN Jumper nicht entfernt und mehr als 5V an dem VIN angeschlossen, kann das zur irreparablen Beschädigung der Platine oder Leitung führen.  |
Automatischer Reset (Software)Anstatt ein Reset durch das physische Drücken der Reset-Taste erforderlich zu machen, ist Galileo so konzipiert, dass sie über die Software, die auf einem angeschlossenen Computer ausgeführt wird, zurückgesetzt wird. USB CDC-ACM-Steuersignale werden für den Übergang des Galileo von Run-Time in den Bootloader-Modus verwendet. Die Arduino-Software nutzt diese Fähigkeit, um das Hochladen des Codes zu ermöglichen, indem einfach die Taste 'Hochladen' in der Arduino-Umgebung gedrückt wird. Für weitere Einzelheiten lesen Sie bitte in der Intel Galileo Anleitung für die ersten Schritte nach. |
Physikalische EigenschaftenDie Galileo ist 106,68mm lang und 71,12mm breit. Allerdings werden diese Abmessungen durch die USB-Steckverbinder ( UART-Buchse, Ethernet-Steckverbinder und die Strombuches) erweitert. Vier Vorbohrungen für Schrauben ermöglichen, dass die Platine an eine Oberfläche oder ein Gehäuse montiert wird. Bitte beachten Sie, dass der Abstand zwischen den digitalen Kontakten 7 und 8 160 mil (0,16") beträgt, also kein geradzahliges Vielfaches des Abstands von 100 mil der anderen Kontakte ist. |
Vorderansicht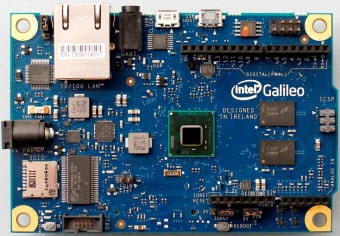 |
Rückansicht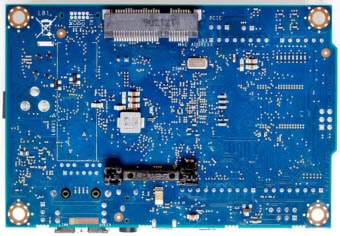 |
| Speicher | |
| AP4GMCSH4-B | 4GB Gewerbliche MicroSD-Karte, Klasse 4, mit SD-Adapter |
| AP8GMCSH4-B | 8GB Gewerbliche MicroSD-Karte, Klasse 4, mit SD-Adapter |
| AP16GMCSH4-B | 16GB Gewerbliche MicroSD-Karte, Klasse 4, mit SD-Adapter |
| PCIe-WiFi-Module | |
| 135BN.HMWG | Centrino Wireless-N 135 802.11b/g/n, 1x1, Einzelband WiFi+ Bluetooth |
| Arduino Marken-Schirmung | |
| A000058 | Arduino WiFi-Abschirmung |
| A000072 | Arduino Ethernet-Schirmung (ohne PoE-Modul) |
| A000021 | Arduino Xbee-Schirmung (ohne HF-Modul) |
| A000079 | Arduino Motor-Schirmung |
| A000043 | Arduino GSM-Schirmung (mit integrierter Antenne) |
| A000075 | Arduino Ethernet-Schirmung (mit PoE-Modul) |
| A000065 | Arduino Kabellose SD-Schirmung |
| A000060 | Arduino Ethernet-Schirmung (ohne PoE-Modul) |
| Kabel |
|
| USB-Kabel | USB Typ A zum Mikro B Kabel, 1,5 Meter |
| TTL-232R-3V3-AJ | USB to UART cable with +3,3V TTL level UART signals via 3,5mm Audio Jack |
| TTL-232R-3V3-WE | USB an UART-Kabel mit +3,3V TTL-Stufe UART-Signale (mit Drahtende) |
| TTL-232R-5V-AJ | USB an UART-Kabel mit +5V TTL-Stufe UART-Signale über 3,5mm Audiobuchse |
| TTL-232R-5V-WE | USB an UART-Kabel mit +5V TTL-Stufe UART-Signale (mit Drahtende) |
| Austausch Stromkabel (Anmerkung: Netzteil mit Adaptern ist im Lieferumfang von Galileo enthalten) |
|
| Netzteile |
Plug-in--AC-Adapter zur Wandmontage |
| Ethernet-Kabel (Hinweis: nicht im Lieferumfang von Galileo enthalten) |
|
| Ethernet/Netzwerk | |
| Gehäuse | |
| Hammond Galileo Gehäuse | Erhältlich in Schwarz, Grau und Blau |
Hinweis: Die Stromversorgung mit den jeweiligen Adaptern ist im Lieferumfang enthalten
|
||||||

 Galileo Datenblatt
Galileo Datenblatt
Technische Probleme oder Störungen? Füllen Sie das Support-Request-Formular ausSupport-Request-Formular |
|
|

![]() Mouser ist an einem lebhaften und respektvollen Austausch auf seiner Website gelegen. Um eine kooperative Diskussion zu ermöglichen, hinterlassen Sie bitte nur Kommentare, die für die Themen auf dieser Seite relevant sind. Alle Kommentare werden vor der Veröffentlichung überprüft, um sicherzustellen, dass der sprachliche und sachliche Inhalt unseren Anforderungen entspricht.
Mouser ist an einem lebhaften und respektvollen Austausch auf seiner Website gelegen. Um eine kooperative Diskussion zu ermöglichen, hinterlassen Sie bitte nur Kommentare, die für die Themen auf dieser Seite relevant sind. Alle Kommentare werden vor der Veröffentlichung überprüft, um sicherzustellen, dass der sprachliche und sachliche Inhalt unseren Anforderungen entspricht.
Melden Sie sich nachstehend an, um einen Kommentar zu hinterlassen.
![]()